ros初步部署完成,调试中。
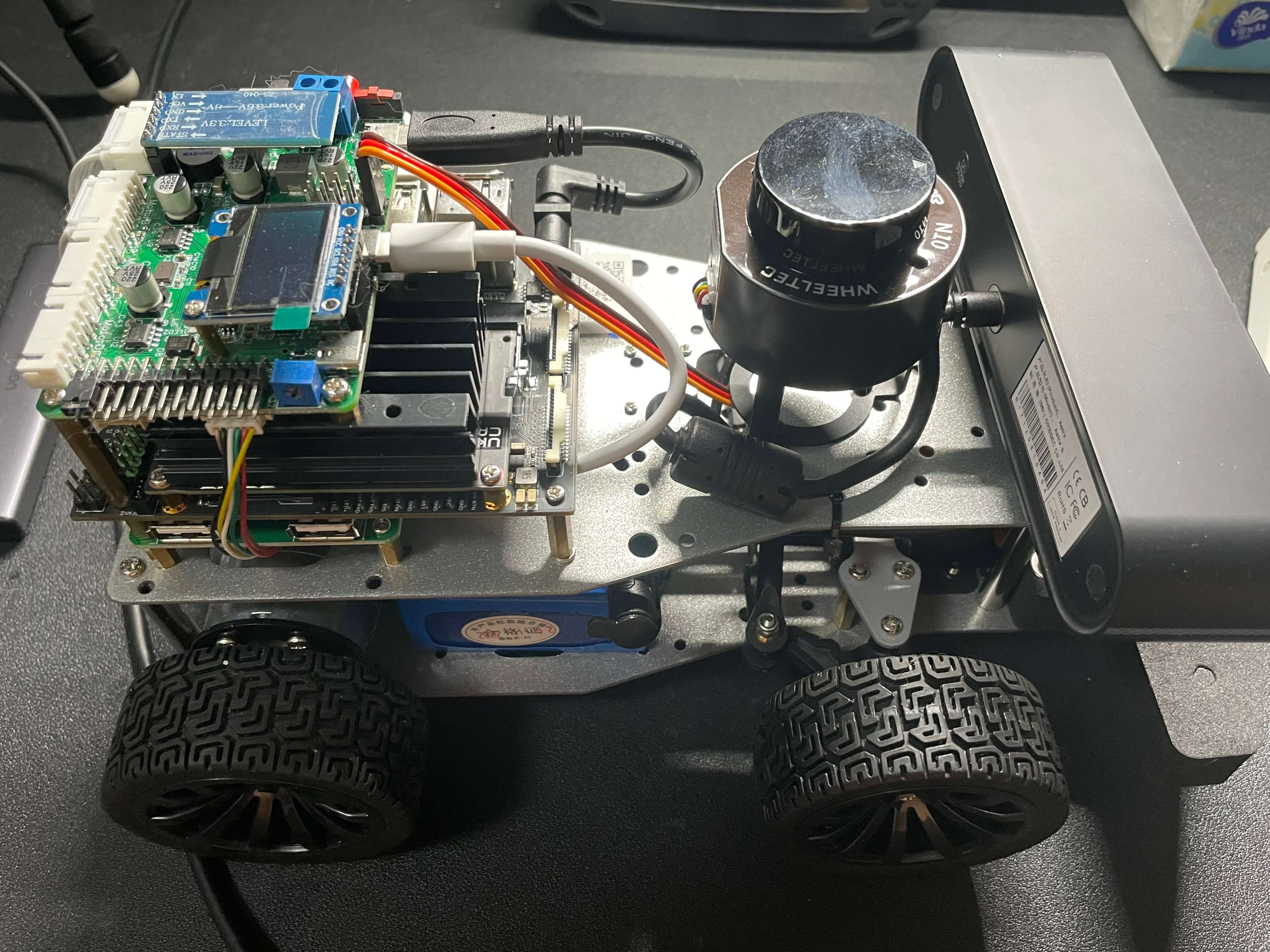
硬件资源:
STM32主控板*1
Jetson nano*1
电机*2
舵机*1
单线激光雷达*
RGB+深度相机*1
功能开发进度
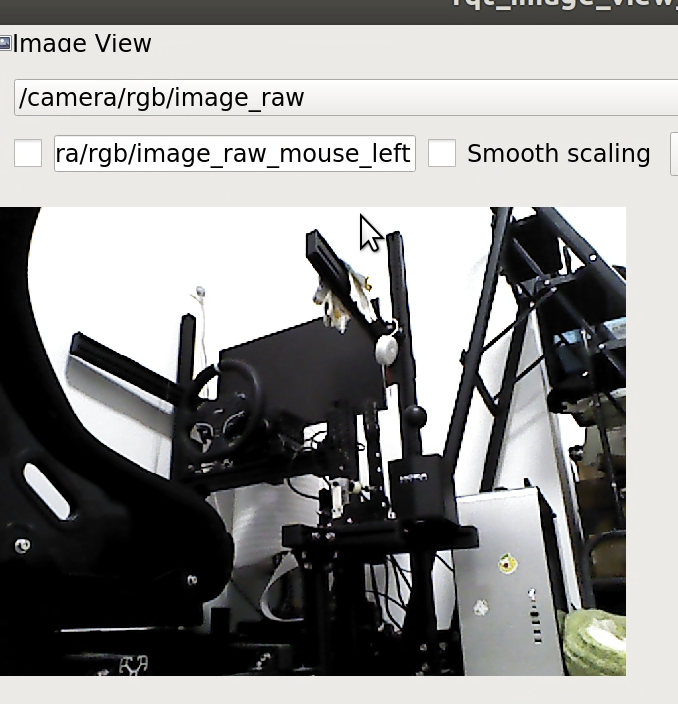
RGB摄像头:
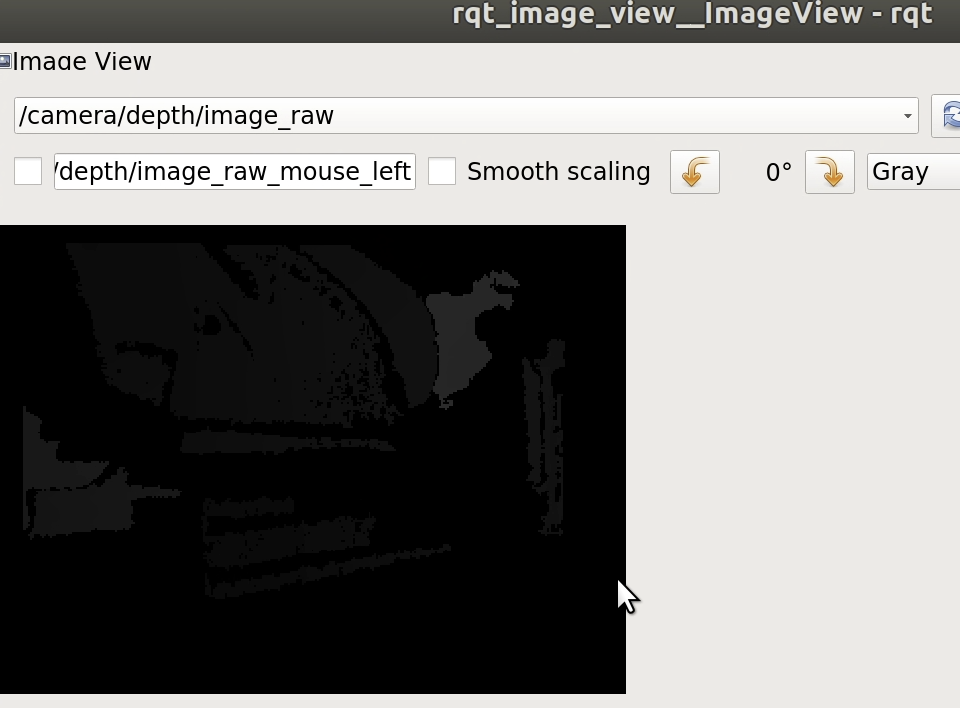
深度摄像头:
里程计topic:
rostopic echo /odom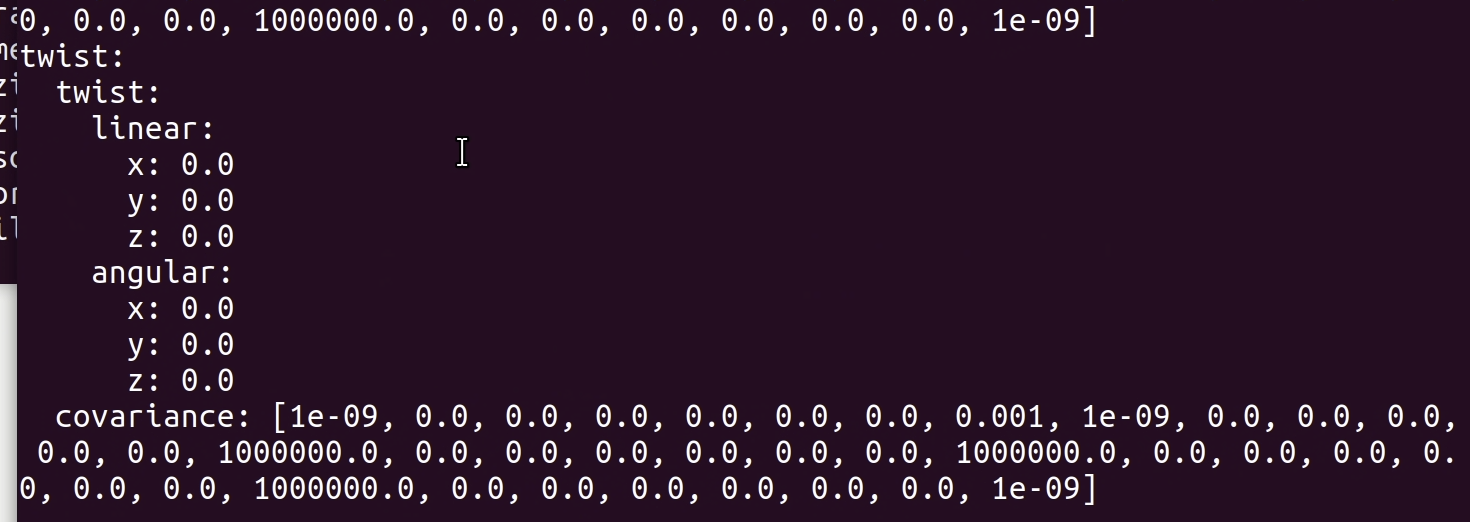
IMUtopic:
rostopic echo/mobile_base/sensors/imu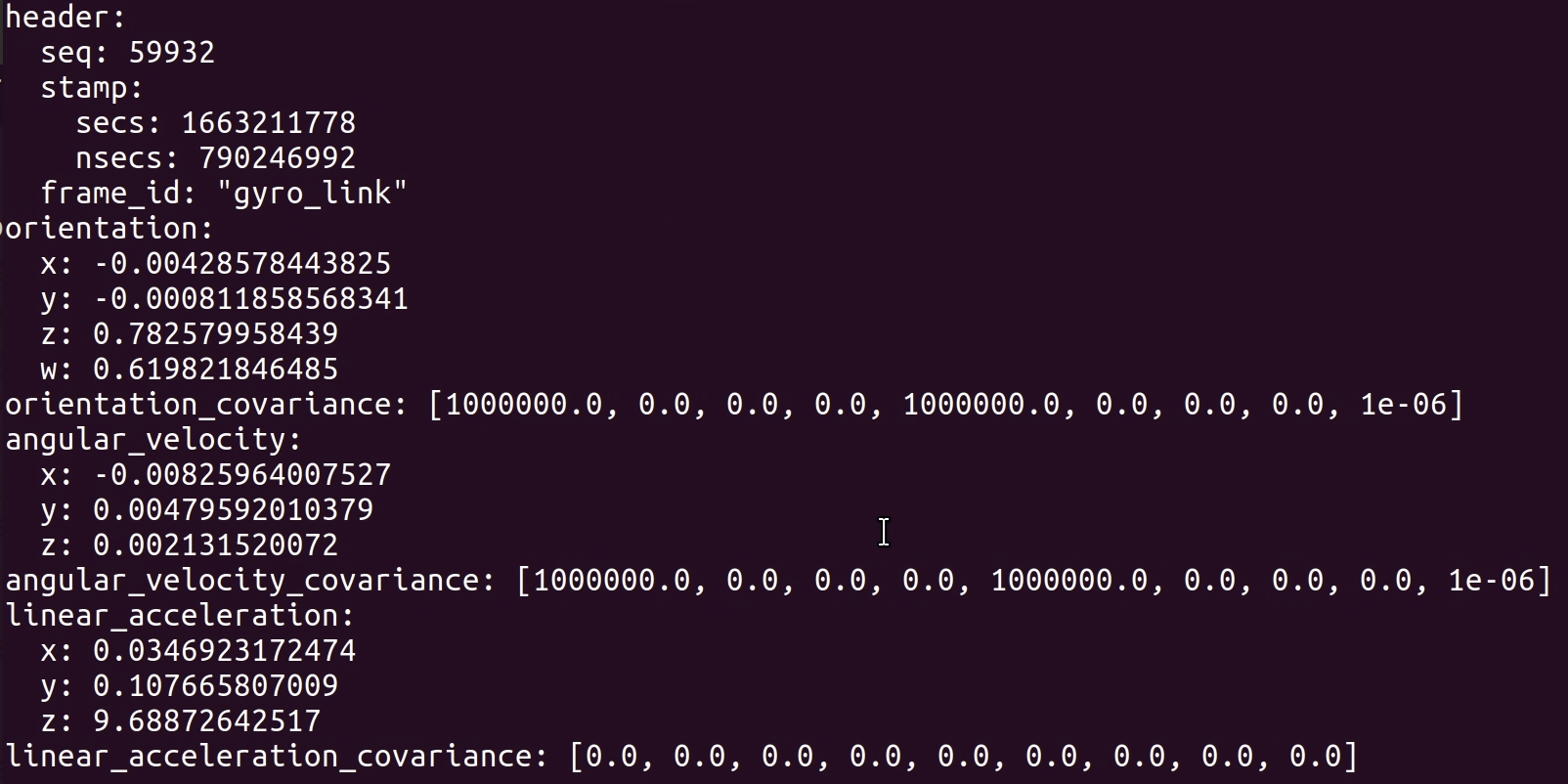
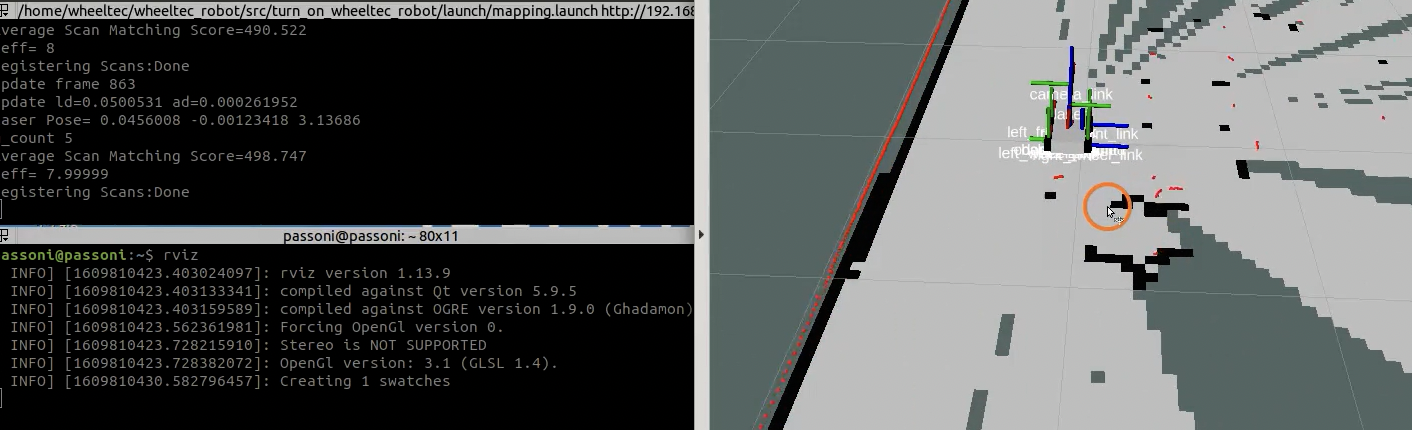
建图
算法用的是gmapping
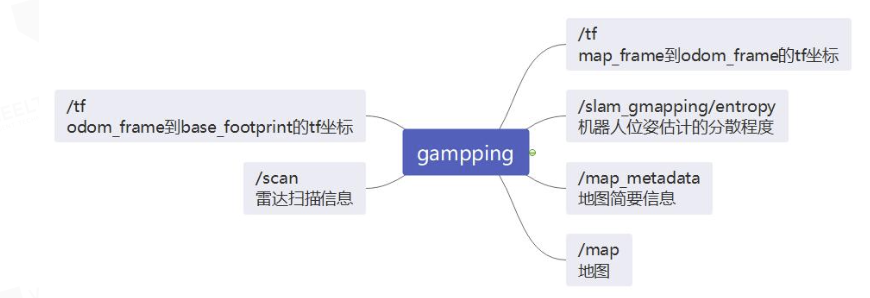
构建大地图时内存和计算量都会增加,,所以目前没发做大地图,同时,由于没有回环检测,容易造成地图错位。
建图还有点问题,需要继续调试。